車載攝像頭是安裝在車輛上的攝像裝置,主要用于采集車輛周圍環境的圖像信息,為車輛的行駛和安全提供支持。傳統汽車的車載攝像頭只是指倒車影像用的攝像頭,但隨著近幾年汽車的智能化和電動化的功能需要,車載攝像頭開始提出各種新功能要求,而且應用領域也越來越廣,例如從最開始的行車記錄儀,再到現在的變道輔助、駐車輔助、智能駕駛、艙內監控等等。

北測光學實驗室
近年來,自動駕駛技術的迅速發展,車載攝像頭成為自動駕駛感知系統的關鍵組成部分之一。用于捕捉周圍環境的圖像或視頻數據。這些數據可以被自動駕駛系統處理,用來識別和檢測道路標志、車道線、行人、車輛等物體,為自動駕駛的決策系統提供必要的信息。由于車載攝像頭的重要性,為保障產品的質量,對其可靠性指標和光學性能指標的測試也變得非常重要。北測集團引入了全套的車載攝像頭和汽車側后視鏡的測試能力,并按標準要求建立了光學實驗室,全力為汽車的行駛安全保駕護航。
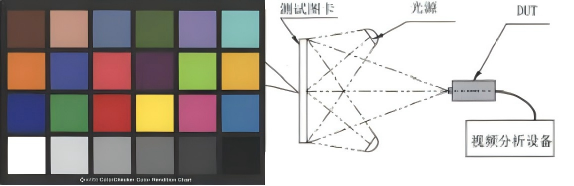
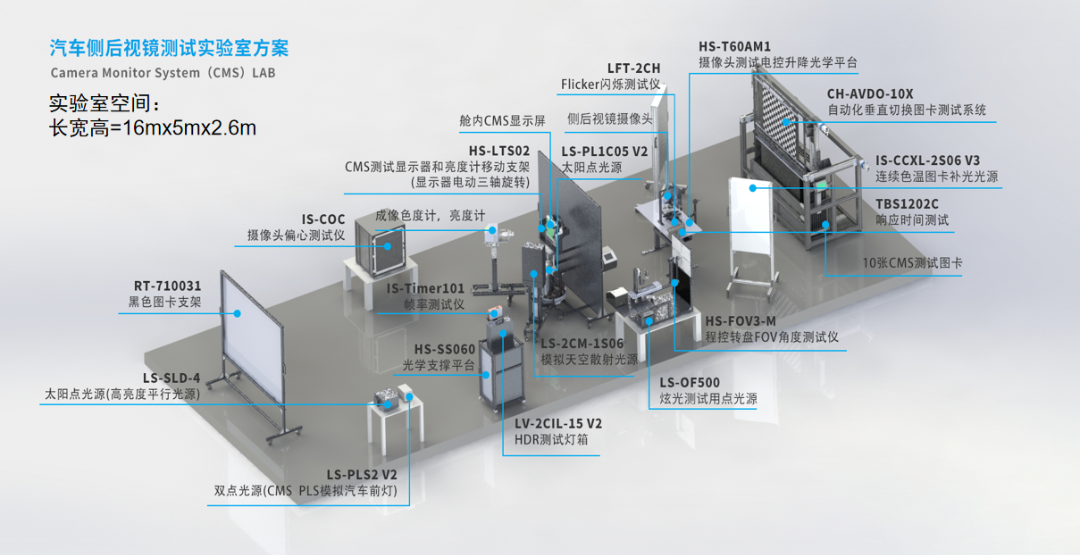
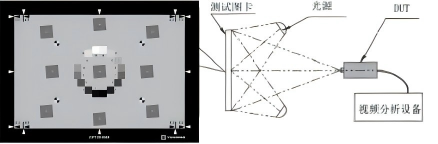
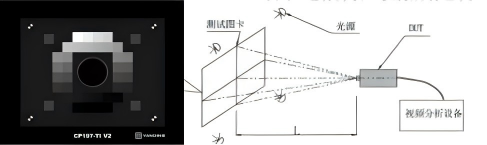
光學實驗室的布置如下圖所示:
典型測試設備如下:
MTF的測試方法
如果HFOV≥140°,使用斜棋盤格測試圖卡進行測試,調節DUT與測試圖卡之間的距離,使測試圖卡中方格邊緣的長度不得少于10像素;
b)調整DUT使中心視場測試圖卡方格的邊緣與其對應方向的夾角約5°;
c)調整DUT使其光軸正交于測試圖卡平面,使用圖像處理軟件分析中心視場MTF5OP值;
d)可通過水平或垂直旋轉DUT,使被測測試圖卡方格處于70%視場處,測試圖卡方格邊緣的長度不得少于10像素;
e)使用圖像處理軟件分析70%場(左上、右上、左下、右下四個邊角)的MTF5OP值。
如果HFOV≥140°,使用斜邊測試圖卡進行測試,調整DUT使視場中測試圖卡方格的邊緣與其對應方向的夾角約5°;
b)通過圖像處理軟件分析中心視場和70%場(左上、右上、左下、右下四個邊角)的MTF5OP值。
按QCT 1128標準的要求,產品水平或垂直方向的MTF值應符合下表的規定。
按QCT 1128標準的要求,產品水平或垂直方向的MTF值應符合下表的規定。
白平衡
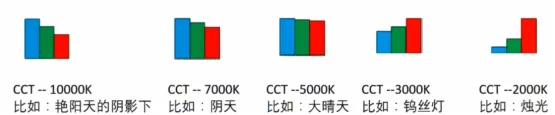
在解釋白平衡之前,需要先了解另一個概念:色溫,也稱相關色溫,CCT,是一種溫度衡方法,通常用在物理和天文學領域,這個概念基于一個虛構的絕對黑體,絕對黑體從絕對零度(-273℃)開始加溫后,黑體的顏色會逐漸由黑變紅,轉黃,發白,最后發出藍色光,這種隨溫度而產生的顏色變化就光譜特性。
當加熱到一定溫度,黑體發出的光所含的光譜成分,就成為這一溫度下的色溫。色溫用“K”(開爾文)表示。(理解:如果某光源發出的光,與某一溫度下黑體發出的光所包含的光譜成分相同,就稱為某K色溫。如100W燈泡發出的光的顏色,與絕對黑體在2527℃時的顏色相同,那么這個燈泡發出的光的色溫就是:(2527+273)K=2800K。使用這種方法標定的色溫與普通大眾所認為的“暖”和“冷”正好相反,例如,通常人們會感覺紅色.橙色和黃色較暖,白色和藍色較冷,而實際上紅色的色溫最低,然后逐步增加的是橙色、黃色、白色和藍色,藍色是最高的色溫。
色溫不僅可以影響我們的視覺感受,還可以影響我們的情緒和身體的生理反應。高色溫的光線能提升注意力、增強活力、改善視覺體驗和調整生物鐘;中等色溫和光線能舒緩情緒、增強溫馨感和改善視覺舒適度;低色溫的光線創造浪漫氛圍、促進放松和增加舒適感。在不同的場合和需求下,選擇合適的色溫光源對于人們的生活和工作都具有重要意義。
下面我們來解釋什么是白平衡(WB,white balance):照相攝像設備對于不同光源照明條件下的被拍攝物體所得到的影像還原應具有與人眼在相同照明條件下觀察被拍攝物體相符合的色彩再現。
如下圖白色在人眼中的表現為:

這就導致在利用自然光拍攝時,由于不同時間段光線的色溫并不相同,因此拍攝出來的照片色彩也并不相同。例如,在晴朗的藍天下拍攝時,由于光線的色溫較高,因此照片偏冷色而如果在黃昏時拍攝時,由于光線的色溫較低,因此照片偏暖色調 利用人工光線進行拍攝時,也會出現光源類型不同,拍攝出來的照片色調不同的情況。
那么是如何處理顏色的偏差呢?這就引出了白平衡這個概念,根據中國汽車行業標準QCT 1128《汽車用攝像頭》,白平衡(White Balance)是指車載顯示設備在不同光照環境下,通過調整紅、綠、藍(RGB)三原色的比例,確保白色顯示準確且無色彩偏差的技術要求。其核心目的是保證顯示屏在各種環境光線下(如日光、陰天、夜間等)均能呈現真實、一致的色彩,恢復圖像的正常顏色,避免因色溫差異導致的信息誤讀或視覺疲勞。
如下圖,左邊的圖整體白平衡誤差明顯,且眾多色塊明顯偏色,這種色彩響應對于消費電子行業的影像效果來說是不能接受的。
攝像頭模組里的白平衡算法,通過調節攝像頭的RGB通道的強度,補償不同光源的色溫差異(如暖光偏黃、冷光偏藍),使白色在顯示屏上呈現中性。或者通過配置的環境光傳感器,實時檢測外部光照條件,并自動調整白平衡參數,確保色彩一致性。
白平衡的測試,就是用不同色溫的光源(800Lux,色溫2800K、4000K、6500K)照射在馬克貝斯24色彩色測試圖卡上。要求圖卡的中性色塊不能有明顯色差,圖像不能產生偏色現象,24色彩色測試圖卡第#21,#22兩塊(中間兩塊)灰度卡HSV中的色飽和度(S)值應小于15%。
最后提下HSV參數,以及灰度卡對應HSV參數。
HSV(色相Hue、飽和度Saturation、明度Value)顏色空間是一種從人的視覺系統出發建立的顏色空間,常用于圖像處理和計算機視覺中。
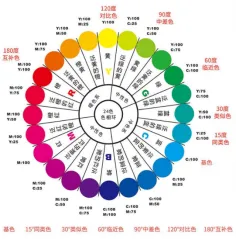
在HSV顏色空間中,色相H表示顏色的種類(如紅色、綠色等);色相是色彩的首要特性,是區別各種不同顏色的最精確的標準。事實上任何黑白灰以外的顏色都有色相的屬性。自然界中各個不同的色相是無限豐富的,如紫紅、銀灰、橙黃等。色相即各類色彩的相貌稱謂。主要的色相有:三原色:紅、黃、藍;三間色:橙、綠、紫。色相環是一種非常有用的色彩理論模型,它把各種顏色按照一定的順序排列在一個環形上,這樣我們就能更好地理解和運用顏色之間的關系。
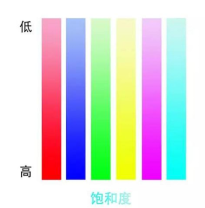
飽和度S表示顏色的純度,即色彩的鮮艷程度,也稱作純度,表示顏色中混入灰色成分的比例。在色彩學中,飽和度越高,顏色越鮮艷,原色飽和度最高,隨著飽和度降低,色彩變得暗淡直至成為無彩色(黑、白、灰),即失去色相的色彩。
明度V表示顏色的明亮程度。明度是色彩的明暗程度,反映光線反射或發射的強弱,由光線強度決定。明度越高,顏色越接近白色;越低則越接近黑色。同一色相可通過調整亮度產生從深到淺的變化(如深紅→粉紅)。
灰度卡是一種用于校準顯示器或打印設備的工具,其特點是所有顏色均為灰色調,沒有彩色成分。因此,灰度卡的顏色在HSV空間中表現為色相H為0(或任意值,因為灰度與色相無關),飽和度S為0,明度V在0到1之間變化以表示不同的灰色調。
具體來說:
色相H:灰度卡的色相值為0或任意值,因為灰度與色相無關。
飽和度S:灰度卡的飽和度值為0,表示顏色完全不含彩色成分,只有灰度變化。
亮度V:灰度卡的亮度值在0到1之間變化,表示不同的灰色調。
因此,灰度卡在HSV顏色空間中的表示為H=0, S=0, V在0到1之間變化。
信噪比SNR測試
信噪比:視頻信號的大小與噪聲信息(無用信號)大小的比例,以dB為單位
SNR(dB)=20log10(Si/Ni)
式中:
Si:色塊i的信號(平均像素亮度值)。
Ni:色塊i的噪聲值(像素亮度值的標準差)。
在視頻信號中,信噪比是衡量視頻質量的重要指標之一。信噪比越高,表示視頻信號越清晰,噪聲干擾越少,視頻質量越好。反之,信噪比越低,視頻信號中的噪聲干擾越多,可能會影響視頻的觀看體驗。
圖像中的噪聲是一些原始場景并未攜帶的內容,圖像領域很多時候用瑕疵(artifacts)來表達其影響。通常來說,噪聲是由隨機過程造成的測量的統計偏差。在圖像領域,噪聲表現為圖像中的瑕疵,看上去就像是覆蓋在圖像上的顆粒物。在一副圖像內,噪聲有不同的形式表現,降低圖像質量。

上面兩張對比圖直觀地展示了噪聲對圖像質量的影響
噪聲是傳輸信號伴生的不規則信號擾動的副產物,它們會讓想要獲得的目標變模糊。因此在圖像領域,理想的狀態是:創造出強信號同時將伴隨信號的噪聲做到最小。但實際操作起來難度很大,特別是在低光照環境下,信號本身就已經很弱了。
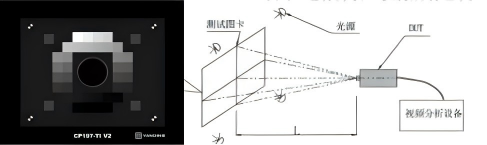
測試SNR的方法為:
a)用D50面光源,按照ISO 15739:2013中5.4.3調節光源亮度,最終輸出OECF卡的18%灰色塊區域亮度數字化值應為110~130(推薦值為118)。背光亮度均勻性不小于90%,亮度的幅度變化不大于2%;
b)HFOV<140°的DUT選取各階灰度塊中心不小于64×64像素;HFOV≥140°的DUT選取各階灰度塊中心不小于45×45像素;
c)使用圖像處理軟件,根據ISO15739:2013附錄B進行分析,獲得所有色塊SNR的總平均值作為測評值。
QCT 1128標準中的要求是:SD產品的SNR應不小于34.7dB;HD產品的SNR應不小于30dB。
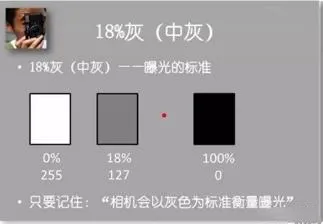
最后再解釋是什么是18度灰。
18度灰是什么?我們的眼睛之所以能夠看見物體,是因為光線照射到物體上,然后物體的反射光線進入了我們的眼睛,形成了“像”。不同的物體對光線的反射能力是不一樣的,比如:純白色的物體對光線的反射能力是98%、純黑色的物體對光線的反射能力是0%。可能有人會想:極白對光線的反射能力是100%、極黑對光線的反射能力是0%,那么不是極黑也不是極白,那些我們平常看見的物體對光線的反射能力是不是50%?這個不是的,在很久以前科學家就通過科學研究發現,大自然中物體對光線的平均反射率為18%,也就是我們人眼平常看到的亮度。所以這個18%就被稱為中間調,也就是18度灰。
我們人能夠通過眼睛來判斷畫面的亮度,判斷出畫面是過亮還是過暗。但是相機不行啊,它只是個機型,它無法判斷出畫面是過亮了還是過暗了。所以我們就要給相機一個標準,告訴相機在這個標準內曝光是正常的,低于這個標準畫面就偏暗,高于這個標準畫面就偏亮。
剛剛給大家講了大自然中的物體對光線的平均反射率為18%,也就是我們人眼看到的亮度。所以就把18度灰作為相機的標準,在這個標準內拍出來的照片曝光就是正常的,低于這個標準拍出來的照片就是曝光不足的,高于這個標準拍出來的照片就是曝光過度的。
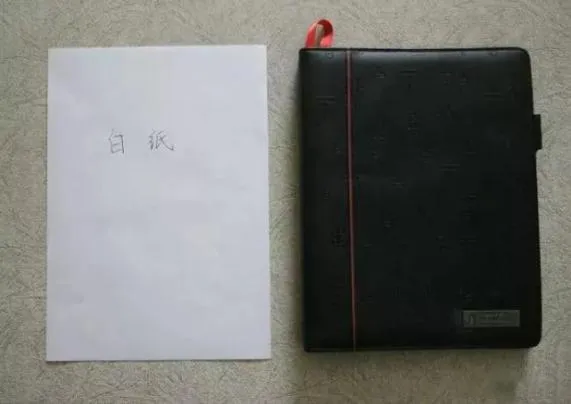
相機在拍攝時通過測光,測出畫面的亮度,然后通過調整光圈、快門、感光度來拍出一張18度灰的照片,也即是一張不偏亮,不偏暗,曝光正常的照片。大家可以嘗試一下,你拿你的相機拍攝純白色物體,比如:白紙、拍攝純黑色物體,比如:黑紙。你會發現無論是拍白色的紙還是拍黑色的紙,拍出來來的照片都是灰色的。
這是因為相機在拍攝純白色的物體時,它會認為畫面過曝了,所以會降低曝光,拍出來的照片就是灰色的。拍黑色的紙也是一樣,相機會認為畫面曝光不足,它會加曝光,拍出來的畫面就是灰色。之所以拍成灰色,就是剛剛給大家說的18度灰,這是相機的標準,相機認為這樣拍出來的照片才是曝光正常的。
拍攝純白和純黑的物體:
白紙拍出來是灰色:
黑紙拍出是灰色:
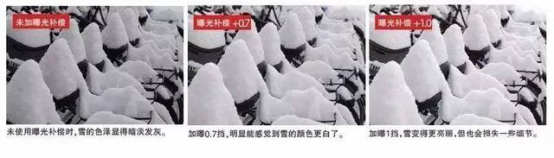
在拍攝絕大多數物體時,18度灰這個標準是沒問題的,拍出來的照片曝光就是正常的。但是極端條件就不行,比如:拍攝雪景,畫面都是雪白的,如果不調整曝光補償拍出來的雪景就是灰蒙蒙的。在比如拍攝暗調人像,畫面都是純黑色的,如果不調整曝光補償拍出來的暗調人像就是灰蒙蒙的。
所以在拍攝雪景時要適當加一點曝光,拍出來的雪景就是雪白的:
所以在拍攝暗調的照片時,就要減少曝光,這樣才能拍出純黑色暗調照片:
這也就是大家常說的“白加黑減”。
動態范圍Dynamic Range
動態范圍(DR)是攝像設備能夠記錄的從最黑到最白之間的最大影調范圍。動態范圍越大說明拍攝的影像層次越分明。所有超出動態范圍之外的曝光值都只能記錄為黑或白。它實際上描述了攝像設備記錄影像灰階等級的能力,可用灰階測試圖卡的灰階級數表達。
自然場景中從無月的暗夜到太陽直射的動態范圍約為180dB,而普通的圖像傳感器由于勢阱容量的限制,動態范圍通常在70dB左右。
真實世界中同一場景中動態范圍變化很大,我們稱之為高動態范圍(High Dynamic Range),相對的普通圖片上的動態范圍為低動態范圍(Low Dynamic Range)。
相機的成像過程實際上就是真實世界的高動態范圍到相片的低動態范圍的映射(非線性)。
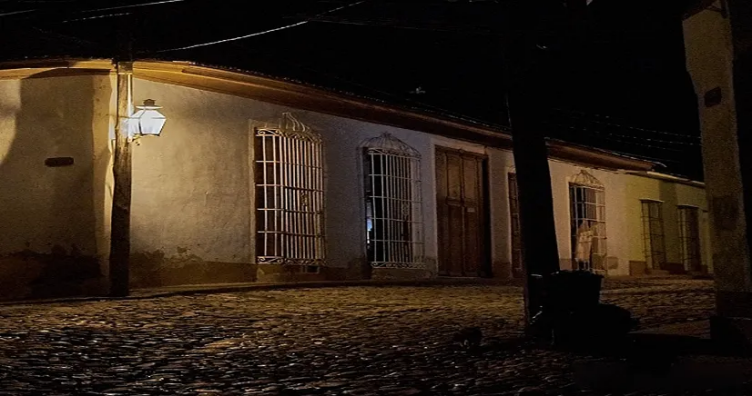
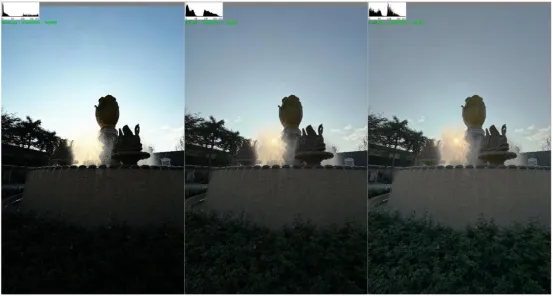
如下所示從左到右依次是低動態、原圖、高動態的圖。可見
(1)動態范圍越廣,高亮和陰影部分的細節展現越清晰,直方圖像素分布越均衡;
(2)動態范圍越窄,越容易出現高亮過曝和暗部死黑現象,高亮和陰影部分的細節幾乎丟失,直方圖上像素堆積在兩端。
動態范圍具體的測試方法是:
1)用D50面光源,按照ISO 15739:2013中5.4.3調節光源亮度,最終輸出OECF卡的18%灰色塊區域亮度數字化值為110~130(推薦值為118);背光亮度均勻性不小于90%,亮度的幅度變化不大于2%;
2)選取各階灰度塊中心不小于32×32像素;
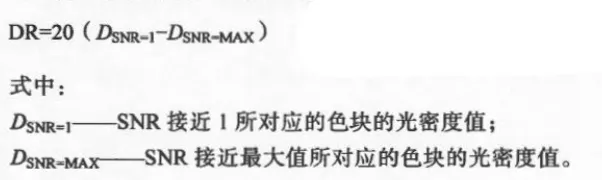
3)通過公式計算出動態范圍值:
QCT 1128標準中的要求是:SD產品的動態范圍應不小于60dB;HD產品的動態范圍應不小于85dB。
動態范圍測試布置圖
色彩還原Color Rendition
色彩還原:將描述景物色彩空間坐標的圖像數據映射為與輸出相關的描述照片色彩空間坐標的圖像數據。
注:色彩還原通常由一個或多個針對輸入和輸出觀察條件的差別所進行的補償構成,因此要將描繪景物顏色的尺度和色域映射在照片的動態范圍和色域上,并使用偏好調整。簡單地說即成像設備真實重現被攝物體顏色的能力,是影響圖像質量的一個重要因素。
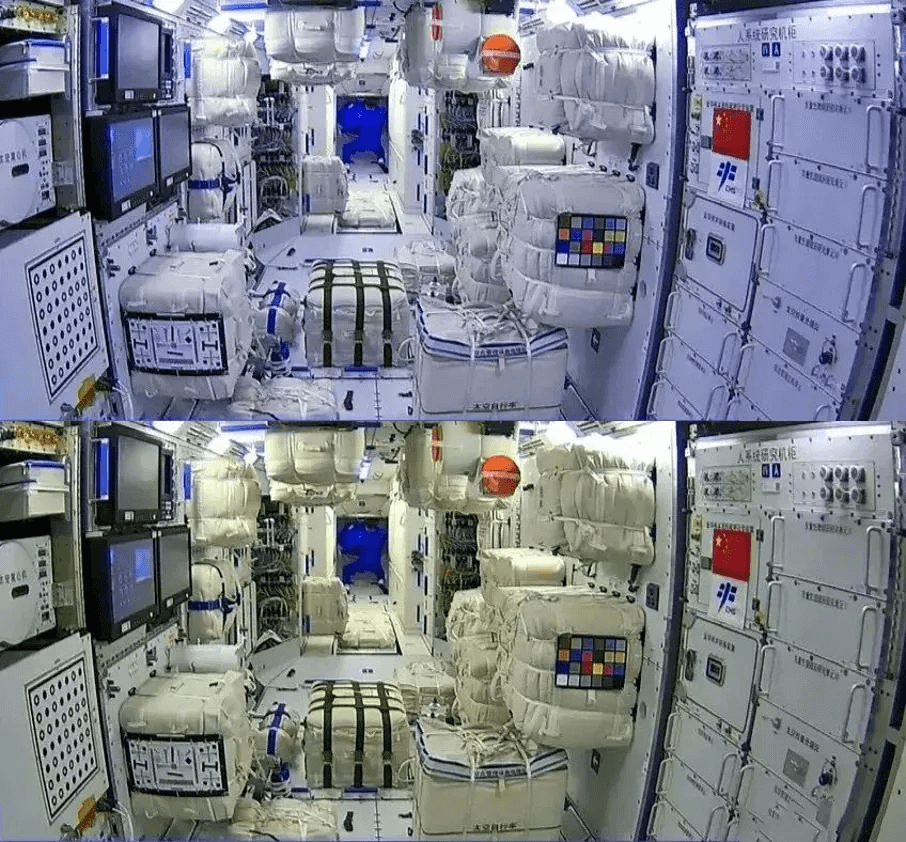
在央視的直播畫面中,我們可以看到一張標準的24色標準色卡,如下圖紅色圓圈中所示。這張色卡是用來實時矯正核心艙中攝像設備的色彩的。太空中的射線是時刻變化又不可控的,因此拍攝的照片顏色通常也是失真的,這就需要標準的色卡來幫助我們將拍攝的畫面矯正到真實的顏色。
如果不對攝像設備進行校色,那我們看到的直播畫面將會如下圖中的上部所示,整個畫面明顯偏藍,色彩區分度很低,像在一個大冷庫中,色彩明顯失真。再看經過色卡矯正后的下圖中的下圖,色彩明顯更有層次,設備是白色的,包裹是黃色的,宇航員的衣服是藍色的,而不是像校色前的一片藍。這就是色卡的神奇作用,而對攝像設備進行校色的過程,我們稱為色彩還原。
從上面神舟十二號的例子中我們可以看到,通過24色卡進行色彩還原后的圖像色彩更加真實,圖像內容更加有層次感。換句話說,通過24色卡進行色彩還原后的色彩的區分度更高。而色彩還原度也是評價攝像設備圖像質量優劣的一個重要指標。
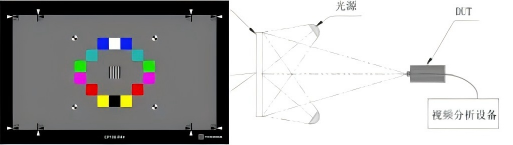
色彩還原測試應在完成自動平衡之后進行,測試在D65光源、TL84光源和A光源照明條件下進行,測試圖卡表面照度應分別為(800±80) lx、(200±20) lx、(25±2.5) lx;
調整DUT的取景,使測試圖卡邊緣與視場邊緣重合;
通過視頻分析設備,分析DUT拍攝各色塊的色度坐標;
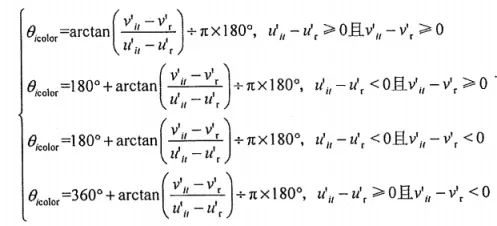
按下式計算圖像中各色塊(i=R,G,B,Ye)與白色塊的色度角;
由下列公式計算圖像中各色塊(i=R,G,B,Ye)與白色塊的歐幾里得距離:
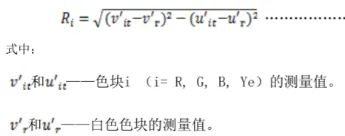
QCT 1128標準中的要求為:色彩還原基于CIE1976色度空間色調角。各色塊與白色塊的實測色度誤差的歐幾里得距離應不小于0.02。
其色調角應滿足以下要求:
a)紅色塊的坐標應在(0°,44.8°)或(332.2°、360°)范圍內;
b)綠色塊的坐標應在(96.6°,179.9°)范圍內;
c)藍色塊的坐標應在(209.9°,302.2°)范圍內;
d)黃色塊的坐標應在(44.8°,96.6°)范圍內。
色彩還原測試布置圖
最后提一下色度空間,CIE 1931 XYZ色彩空間(也叫做CIE 1931色彩空間)是最先采用數學方式來定義的色彩空間之一,它由國際照明委員(CIE)于1931年創立,這是基于心理、物理色而建立起來的表色系或混色系,是受心理因素的影響,即形成心理顏色視覺感受。這種表色法是測色學上,用實體的數值來度量和表達色澤的一種最科學和最精確的顏色表示方法,它使全世界在顏色的測量上有了統一的方法。人類眼睛 有對于短(S, 420-440nm)、中(M, 530-540nm)和長(L, 560-580nm)波長的光感受器,即視錐細胞,因此,根據三種視錐細胞的刺激比例,便能描述任一種顏色的感覺,此稱為LMS空間。色彩空間指的是用一種客觀的方式敘述顏色在人眼上的感覺,通常需要三色刺激值。更精確地說,首先先定義三種主要顏色(primary color),再利用顏色疊加模型,即可敘述各種顏色。CIE 1931色彩空間通常會給出顏色的三色刺激值,并以X、Y和Z來表示。需要注意的是,三種主要顏色未必需要是真正的顏色(也就是該種顏色無法真的被創造出來),X原色相當于飽和度比光譜紅還要高的紅紫,Y原色相當于飽和度比520毫微米的光譜綠還要高的綠,Z原色相當于飽和度比477毫微米的光譜藍還要高的藍。在三色加色法模型中,如果某一種顏色和另一種混合了不同分量的三種原色的顏色,均使人類看上去是相同的話,我們把這三種原色的分量稱作該顏色的三色刺激值。這三個標準單色光可以通過光度學方法精確測定。
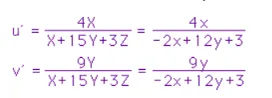
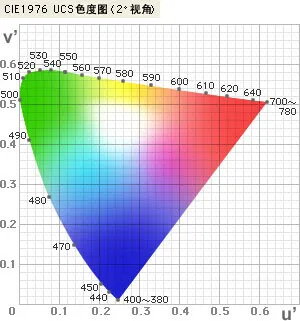
CIE1976色度空間全稱CIE 1976(L*,u*,v*) (也作CIELUV)色彩空間,這個色度空間是為了改進之前的CIE 1931 XYZ色度圖,使其在視覺上更均勻,也就是說顏色之間的差異更符合人眼的感知。L*表示物體亮度,u*和v*是色度,也稱為色品坐標,用來表示顏色,由L*、u*和v*組成的三維坐標,形成了顏色的立體空間。對于一般的圖像,u*和v*的取值范圍為-100到+100,亮度為0到100。U’和 V’值可以按下列公式由三刺激值X、Y、Z算出。
色調角:表示顏色的色調方向,通過u'、v'坐標與白點的相對位置計算。
色距ΔC表示兩個顏色在色度圖中的直線距離,用于量化色度差異。在CIE 1976 UCS中,色距的計算直接基于u'和v'坐標的歐幾里得距離。公式為
CIE1976UCS色度空間
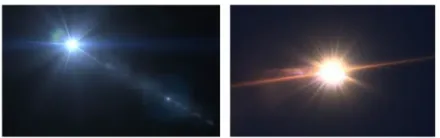
炫光 glare
炫光是視野中由于不適宜的亮度分布,在空間或時間上存在極端的亮度對比,以致引起視覺不舒適和降低物體可見度的視覺條件。表現為視野中出現不適宜的亮度分布,在空間上存在極端的亮度對比,引起視覺不暢或降低物體的可見度。即,如果相機視野中的局部區域出現過高的亮度,會使得相機無法應對此強光的亮度。如果炫光區域布滿整個視野,還可能帶來圖像對比度的整體降低。比如逆光拍攝的圖片,由于強光直接攝入鏡頭,所造成的光源四周過于明亮,或有一圈光暈及霧化的現象。
炫光
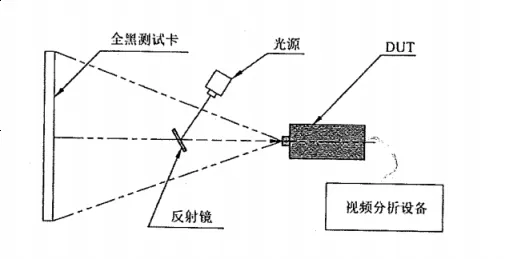
測試時,設置炫光點光源通過反射鏡后入射到DUT視場內,調整光源的入射角度,使圖像中光斑的面積最大,通過視頻分析設備,計算信號強度大于圖像中最大強度50%的區域所占面積,并計算該區域與整個圖像面積的比值。
判定要求:鏡頭在試驗光照射下的產生的光斑面積應不大于顯示面積的25%。
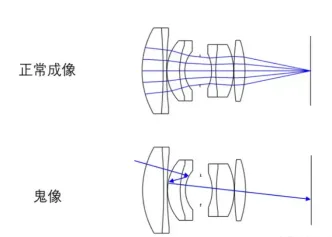
鬼像Ghost
環境中存在的高亮度目標源在鏡頭內部各個透鏡間快速反射,最終在圖像上形成的附加像,其亮度一般較暗,且與原像錯開。由于任何兩個鏡片表面都可能發生這種現象(應該說都在發生,只是強度不同),兩兩組合可以產生很多光路,因此在這種情況下常常會形成一“串”光斑。
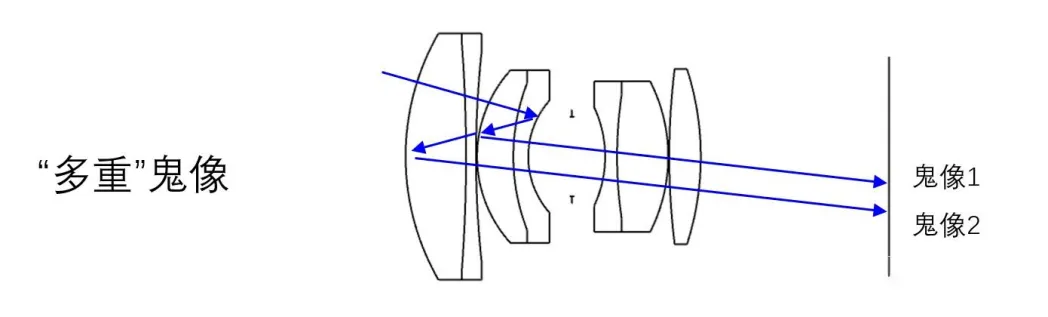
鬼像與視場的面積占比應滿足以下要求:
a)若鬼像與原像的峰值亮度比值大于50%,鬼像與視場的面積占比應小于1%;
b)若鬼像與原像的峰值亮度比值大于30%且不大于50%,鬼像與視場的面積占比應不大于8%;
c)若鬼像與原像的峰值亮度比值不大于30%,鬼像與視場的面積占比不作要求。
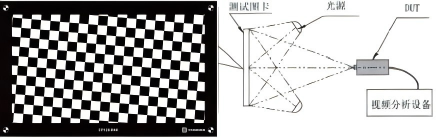
測試時需將DUT在水平方向先順時針旋轉,再逆時針方向旋轉,旋轉中心為鏡頭的幾何中心,保存各視場圖像,再統計分析和計算各視場圖像中的鬼像的面積占比和亮度比值,測試工作量比較大。
鬼像測試設備布置圖
系統延時
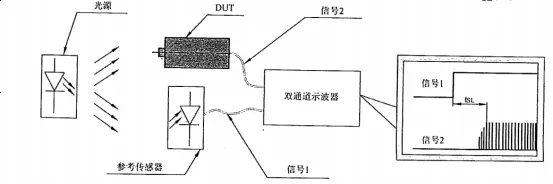
系統延時,也稱延遲時間,是指從攝像頭采集圖像到終端顯示圖像的時間間隔,反映了攝像頭系統對于外界場景變化的響應速度,這個時間越短越好。如果自動駕駛的汽車對路況的感知處理存在較長時間的延遲,行車安全將受到巨大威脅。這個測試主要是為了保證攝像頭系統在車輛駕駛過程中能夠及時地反映出后方的情況,提高行車安全性。
下圖中信號1和信號2(DUT)的差異時間即為系統延時(圖中的tSL),要求實測值應不大于100ms。
系統延時測試布置圖
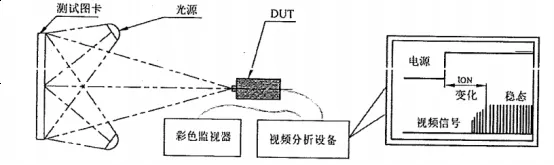
啟動時間
啟動時間是指從攝像頭開始啟動到能夠正常工作所需的時間。快速啟動可以顯著提高工作效率。在需要實時監控或快速響應的應用場景中,如交通監控、門禁系統等,快速啟動能夠減少等待時間,確保監控系統能夠及時捕捉到關鍵事件,從而提高整體的安全性和效率。而且,快速啟動對于無線電池供電的攝像頭尤為重要。這類攝像頭通常采用鋰電池或干電池供電,需要頻繁充電或更換電池。快速啟動技術如SmartAEC?(自動曝光控制、自動增益控制、自動白平衡)能夠使攝像頭在毫秒內完成啟動和調整,從而減少能耗,延長續航時間。這對于需要長時間監控或無人值守的場景(如工業生產線、倉儲物流)非常有利。
此外,快速啟動技術還具有節能環保的優勢。低功耗設計使得攝像頭在工作時消耗的電能較少,降低了能源消耗和碳排放,符合環保要求,這對于環境保護和可持續發展具有重要意義。
下圖中DUT供電電壓信號和穩態的視頻輸出信號之間的差異時間即為啟動時間(圖中的tON),要求實測值應不大于1s。
啟動時間測試布置圖
幀率 Frame Rate
幀率,單位時間產生完整圖像的畫面數。即單位時間對視頻信號空間行的全部掃描數。幀率是衡量每秒顯示畫面數量的參數,直接影響視頻、游戲等內容的流暢度。高幀率帶來更順滑的體驗,低幀率則可能導致卡頓。
視覺暫留現象(Persistence of vision),即人眼在觀察景物時,光信號傳入大腦神經后,視覺形象不會立即消失,而是會殘留約0.1-0.4秒。電影通過每秒播放24幀靜態畫面,利用視覺暫留效應使觀眾感知為連續動作。
QCT 1128標準中對幀率的要求如下表所示:
測試幀率需要使用時間測試儀,測試布置圖如下圖所示:
有效像素 Effective Pixel
像素(Pixel,是“Picture Element”的縮寫,意為“圖像元素”)是構成數字圖像或屏幕顯示的最小基本單位。通俗來說,它是一個帶有顏色和亮度信息的微小方塊,無數個這樣的小方塊按行列排列,就能組成我們看到的完整圖像或屏幕畫面。
有效像素,是電子影像傳感器中能進行有效光電轉換并輸出影像信號的像素。有效像素是評估圖像質量的核心指標。更高的有效像素意味著更大的圖像尺寸和細節表現力。有效像素和像素的概念不同,像素是電子影像傳感器中能單獨感光的物理單元的總和,但其中的一部分像素被用來做輔助計算、補償制造誤差或邊緣畸變或者因為技術限制而無法有效感光,所以有效像素是小于像素值的。
QCT 1128標準中對有效像素的要求如下表所示:圖像信號應正常,不得出現信號丟失的現象。
測試有效像素比較簡單:用DUT拍一張圖片,然后用圖像分析軟件直接對圖片分析即可。
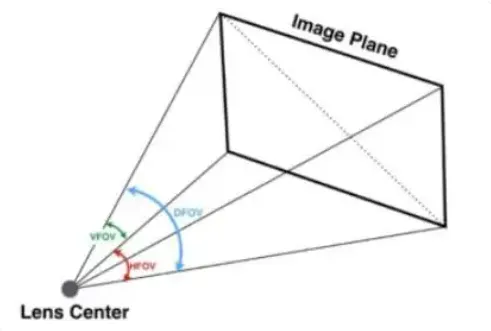
視場角 Field Viewing Angle
視場角,在攝像設備中,以攝像設備的鏡頭中心為頂點,被測目標的物像可通過鏡頭最大范圍的兩條邊緣構成的夾角。視場角的大小決定了光學儀器的視野范圍。一般來說,焦距越短,視場角越大,反之則越小;傳感器尺寸越大,視場角越大。視場角分為水平視場角HFOV和垂直視場角VFOV。大視場角度適合需要廣闊視野的場景,而小視場角度則更適合需要高倍率和精細觀察的情況。
視場角的定義
QCT 1128標準中對產品的HF0V推薦為:(30~200)°;產品的VF0V推薦為:(20~160)°
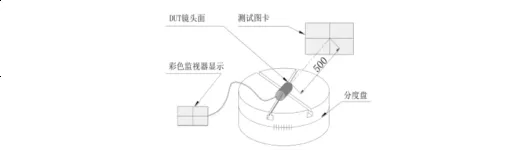
測試方法為:將DUT水平固定在分度盤中心,DUT鏡頭面與測試圖卡的距離為500mm,鏡頭中心應與分度盤中心保持一致;轉動分度盤使測試圖卡豎標線出現在監視器顯示界面的最左側,讀取轉角值∠a,反向調節分度盤使測試圖卡豎標線出現在監視器顯示界面的最右側,讀轉角值∠b,則∠b與∠a之差即HFOV;DUT旋轉90°固定在轉臺中心,同理可測量出VFOV。
視場角測試布置圖
最高照度測試
攝像頭最高照度測試用于評估攝像頭在極端強光環境下的成像性能,確保其在高亮度場景中仍能清晰捕捉圖像細節,避免過曝、光暈或色彩失真等問題。
測試方法是:保證被拍攝象表面的照度應不低于100000lx,一般使用透射式燈箱做為被拍攝物,然后用攝像頭對其進行拍攝,再主觀進行判定。要求圖像應顯示正常,無滾屏、花屏、水波紋、偏色、畫面泛白等現象。
最低照度測試
最低照度也稱為靈敏度,是攝像頭對環境光線的敏感程度,或者說是攝像頭正常成像時所需要的最暗光線。照度的單位是勒克斯(lux或lx),數值越小,表示需要的光線越少,攝像頭也越靈敏。此測試在暗箱(室)中進行,DUT在照度為(2±0.2)lx的環境下,按照測試MTF值的測試方法進行測試,使用圖像處理軟件分析中心視場和70%場MTF值。要求MTF值應不低于下表中數值的60%,無干擾條紋、水波紋等現象。
光軸中心精度optical axis center precision
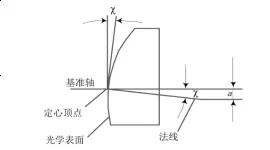
光軸中心精度是指攝像設備的實際成像中心與光學成像理論中心的偏差。這一參數直接影響成像質量和對準精度,尤其在精密光學系統中至關重要。
光軸中心精度的定義
光軸中心精度是使用攝像頭偏心測試儀來進行測試,測量測試圖卡中心在圖像中成像位置與DUT成像畫面的物理中心的偏移量,再計算光軸偏移角度。QCT 1128標準中要求實測值應在(0±2)°范圍內。
θ=arctan(Δɑ/f)(弧度)
θdeg=θ×180/π(度)
自動增益Automatic Gain Control
自動增益是放大電路的增益自動隨信號強度而調整的自動控制方法。是用于根據環境光照條件自動調整視頻放大器的增益,從而確保在不同光照條件下都能獲得清晰的圖像。增益是指對傳感器捕捉到的信號進行放大的程度,增加增益會使圖像看起來更亮,但同時也會增加圖像的噪聲,降低圖像的信噪比。自動增益控制(AGC)電路能夠根據環境光照的變化自動調整放大器的增益。在低亮度條件下,AGC會增加增益以獲得清晰的圖像;而在高亮度環境下,AGC會減少增益以避免信號過載和畸變。這種自動調節機制使得攝像頭能夠在較大的光照范圍內正常工作,適應不同的環境光照條件。
測試方法為:安置好DUT,使其輸出標準視頻信號;在小于1s時間內迅速將(800±80) lx的D65光源切換為(2土0.2)1ux,切換完畢后開始計時,通過視頻分析設備測量視頻信號從變化到穩定的時間:間隔5s后在小于1s時間內迅速切換成(800±80) lx的D65光源,切換完畢后開始計時,通過視頻分析設備測量視頻信號從變化到穩定的時間。QCT 1128標準中要求不同光源切換后的響應時間應不大于1s。
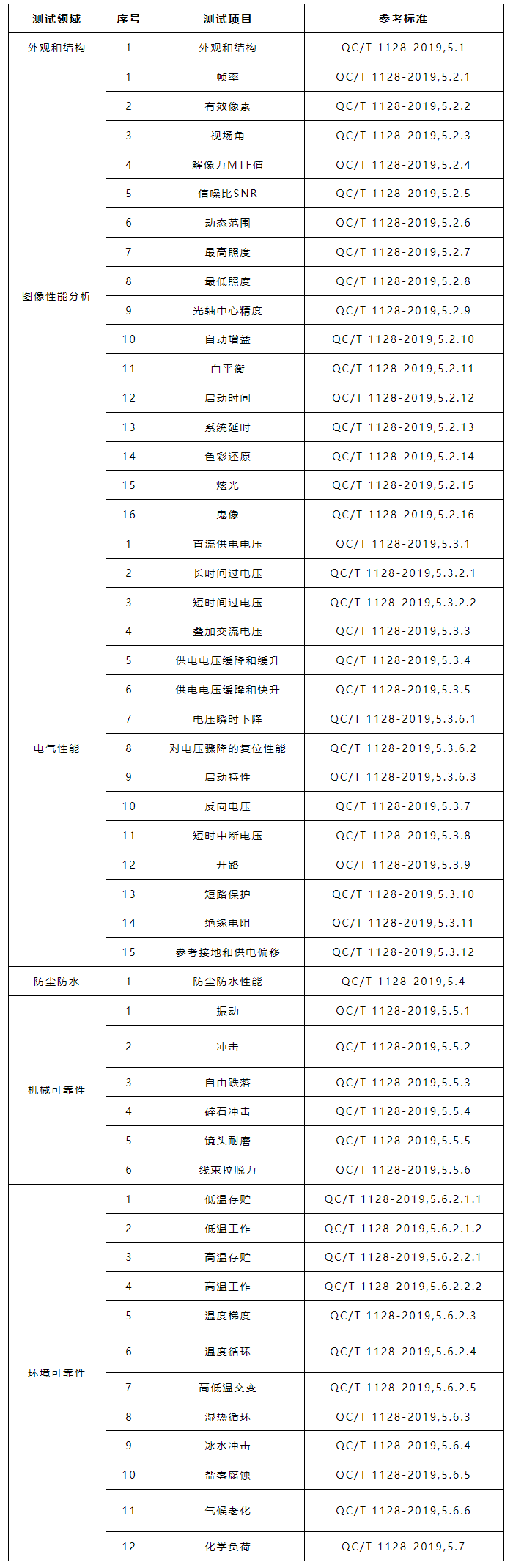
QCT1128測試項目

















 微信公眾號
微信公眾號 微信咨詢
微信咨詢



 信息提交成功
信息提交成功